

 QQ
QQ
雅马哈水平多关节型机器人YK250XC /YK350XG/YK400XG
小型号水平多关节机器人全机型升级!改进为“完全无皮带”结构。不但具有卓越的可靠性和高精度,刚性也进一步得到提高。虽然是小型号,却可以承担与高一级机型相同的大载荷作业。
机械手臂长250mm ~ 400mm的小型水平多关节机器人提高了搬运重量,升级为完全无皮带结构。
前端轴刚性与免维护的特点,可在广泛应用中发挥威力。新增了空心中通规格和法兰工具选配功能,更加便于使用。
机械手臂长250mm ~ 400mm的小型水平多关节机器人提高了搬运重量,升级为完全无皮带结构。
前端轴刚性与免维护的特点,可在广泛应用中发挥威力。新增了空心中通规格和法兰工具选配功能,更加便于使用。
与以往同级机型相比搬运重量增至1.6倍
搬运重量增加到1.6倍,从原机型的3.0kg增至5.0kg。由于前端轴的允许惯性力距大,对高速动作和偏置量较大的工件可发挥极.大威力。虽然是小型号,却可以承担与高一级水平多关节机器人相同的大载荷作业。

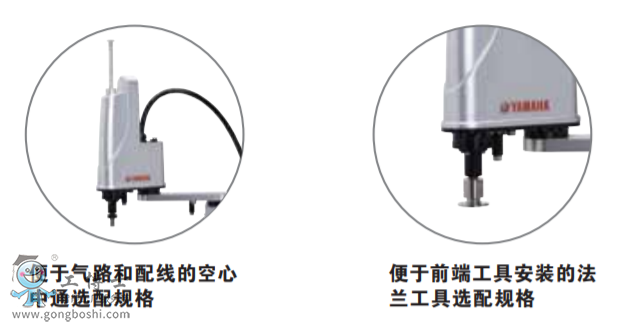
可选配空心中通规格&法兰工具
可选配易于前端工具配线的空心中通规格和安装工具所用的法兰工具。
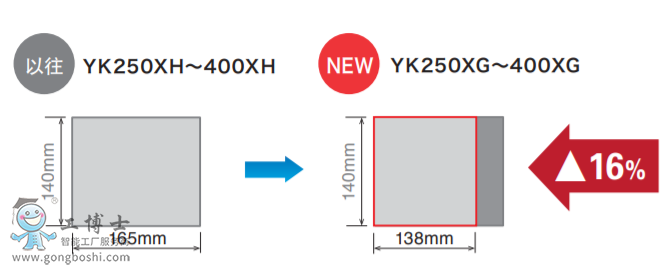
约节省16%的安装空间
在提高搬运重量等基本性能的同时,比原机型节省约16% 的安装面积。可在仅有的安装空间内安装,提高了系统设计自由度。
完全无皮带结构,免维护
ZR轴直接轴联结构,实现完全无皮带结构。大幅减少了前端旋转轴的空转,可长期维持高精度。配合高反复定位精度(土0.004°),可实现超小型零部件的高精度组装。且无需担心皮带的破损、松弛和老化,可长期免维护使用。

是否根据搬运重量和标准周期时间来选择水平多关节机器人呢?与单轴机器人和直交机器人不同,使用水平多关节机器人时,“R轴允许惯性力距”影响较大。对于重工件和偏置大的工件,如果R轴惯性力距小,则周期时间.会大幅延长。雅马哈水平多关节机器人的全部前端旋转轴直接连接减速机。与.普通皮带式多关节机器人相比,其R轴允许惯性力距极高,可实现高速动作。

ZR轴直接轴联结构,实现完全无皮带结构。大幅减少了前端旋转轴的空转,可长期维持高精度。配合高反复定位精度(土0.004°),可实现超小型零部件的高精度组装。且无需担心皮带的破损、松弛和老化,可长期免维护使用。
其他公司不可比拟的R轴允许惯性力距
是否根据搬运重量和标准周期时间来选择水平多关节机器人呢?与单轴机器人和直交机器人不同,使用水平多关节机器人时,“R轴允许惯性力距”影响较大。对于重工件和偏置大的工件,如果R轴惯性力距小,则周期时间.会大幅延长。雅马哈水平多关节机器人的全部前端旋转轴直接连接减速机。与.普通皮带式多关节机器人相比,其R轴允许惯性力距极高,可实现高速动作。
采用高可靠性旋转变压器
位置检测器与其他雅马哈机器人一样,使用旋转变压器。零部件数量少的坚固结构,与光学编码器相比,具有****的高可靠性。由于机器人侧没有电路构造,可以降低突发故障的几率,使维护和生产的故障停机时间降至*低。
更多资讯:雅马哈机器人
